System integreiddio Robot Delta
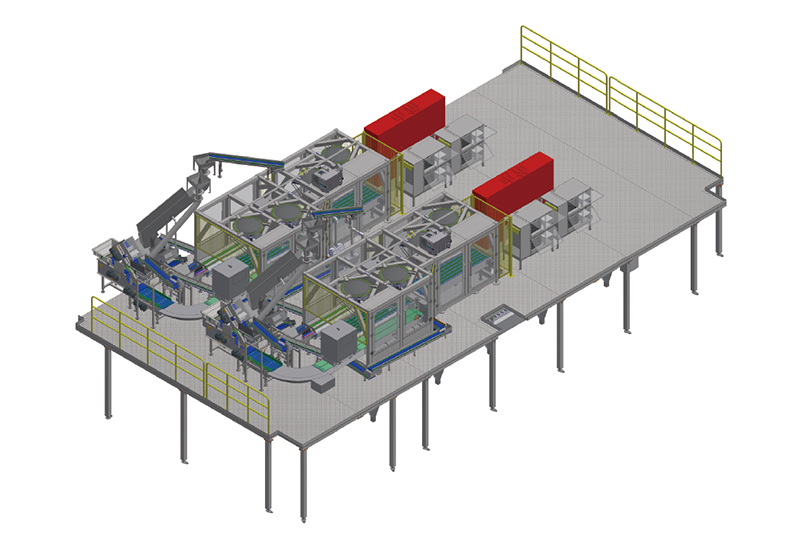
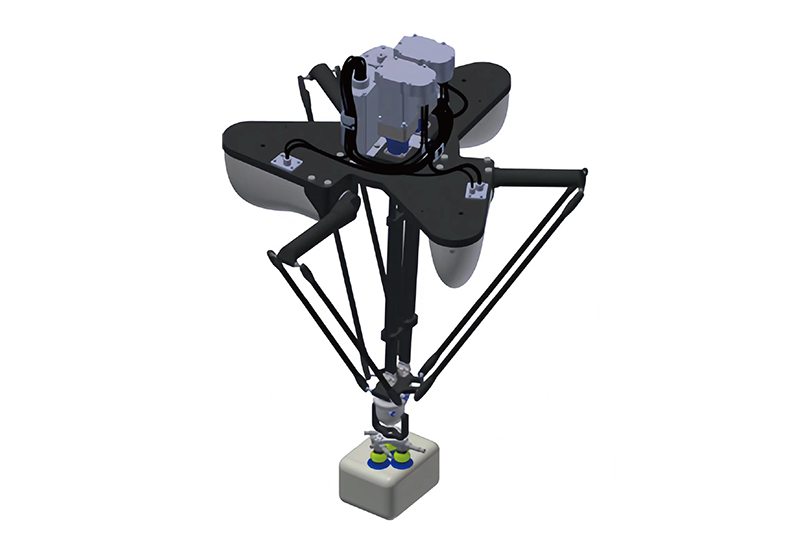
Caiff y cynhyrchion pecynnu mewnol heb eu trefnu eu rhyddhau o'r storfa. Ar ôl cael eu didoli gan y servo dad-sgramblwr a chaiff safle'r cynnyrch ei adnabod gan y system weledol. Yn ystod y peiriant pecynnu casys, bydd y system weledol yn rhannu'r wybodaeth gyda'r robot pry cop, a bydd y robot pry cop yn gafael ac yn gosod y cynhyrchion yn y pecynnu allanol cyfatebol.
Cais
Addas ar gyfer didoli, adnabod a chipio cynhyrchion pecynnu mewnol heb eu trefnu ar ffurf poteli, cwpanau, casgenni, bagiau, fel te llaeth powdr, vermicelli, nwdls gwib, ac ati, a'u rhoi y tu mewn i'r pecynnu allanol.
Lluniadu 3D


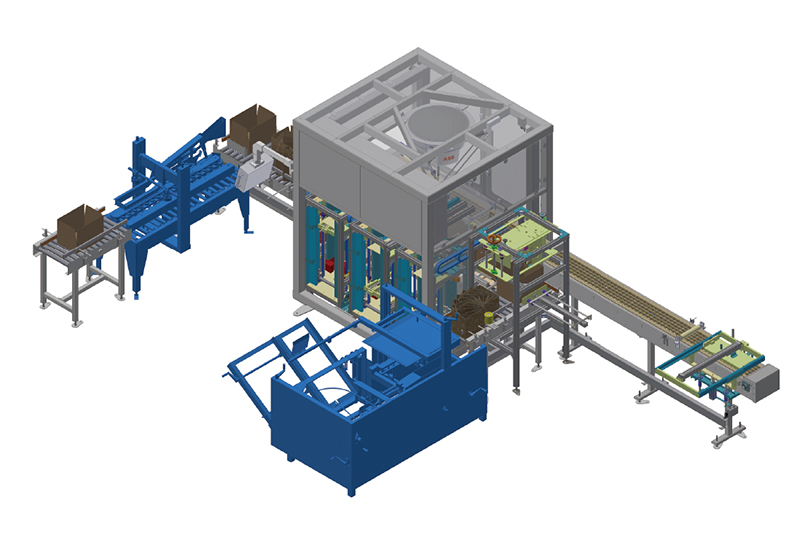
Llinell bacio
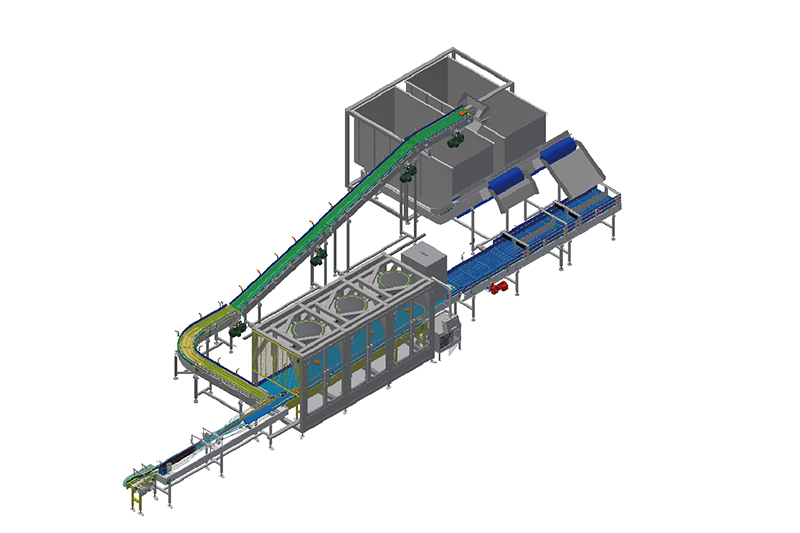
Llinell dad-grymwr

Ffurfweddiad Trydanol
| PLC | Siemens |
| VFD | Danfoss |
| Modur servo | Elau-Siemens |
| Synhwyrydd ffotodrydanol | SALWCH |
| Cydrannau niwmatig | SMC |
| Sgrin gyffwrdd | Siemens |
| Cyfarpar foltedd isel | Schneider |
| Terfynell | Ffenics |
| Modur | GWNÏO |
Paramedr Technegol
| Model | LI-RUM200 |
| Cyflymder sefydlog | 200 darn/munud |
| Cyflenwad pŵer | 380 AC ±10%, 50HZ, 3PH+N+PE. |
Mwy o sioeau fideo
- Llinell didoli, bwydo, dad-sgramblo a phacio casys robot Delta






